Grupo 13 - Sistema de assistência residencial
![[Vídeo do projeto]](/projects/Poster.png)
| Equipa: | Grupo 13: Gabriel Silva (Coord.) Davide Morgado Ângelo Soeiro Bruno Santos Guilherme Maniezo Rodrigo Vieira |
| Empresa | Diferencial - Electrotecnica Geral |
| Orientadores: | António Tavares (Diferencial - Electrotecnica Geral) e Paulo Pedreiras (DETI) |
Desafio
Como descrito anteriormente, o projeto desenvolvido consiste num sistema de assistência residencial, em habitação própria, que se centrará em utentes com uma idade já mais avançada. Um projeto como este é, atualmente, importante, devido à situação global da pandemia, pois esta apresenta uma taxa de mortalidade superior em pessoas com mais de 60 anos e os lares de terceira idade apresentam uma taxa de infeção bastante elevada. Isto faz com que este projeto tenha uma tremenda significância na proteção contra o vírus para idosos auto-suficientes, que queiram permanecer nas suas casas. Para além destes casos, não podemos menosprezar os casos em pessoas que não querem ou não têm capacidade financeira para colocar os seus familiares em lares, mas que também não os conseguem ter em casa pois não têm disponibilidade, nem condições, para tomar conta deles. Para tal, com a adesão a este sistema, poderão sair para o trabalho descansados pois sabem que se algo acontecer serão notificados. O projeto inicialmente proposto tinha como objetivo um sistema de assistência residencial, que agrupava 3 dispositivos principais: um transmissor de posição e movimento; dispositivos repetidores; unidade central de processamento. O transmissor de posição e movimento tinha como objetivo monitorizar a movimentação do utilizador dentro da sua habitação e, em particular, detetar as quedas do mesmo. Para isto, teriam de existir sensores do tipo acelerómetro e giroscópio. A comunicação deste dispositivo com os repetidores seria executada através de protocolo de comunicação BLE. As mensagens recebidas por estes dispositivos eram então encaminhadas para a Unidade de Controlo, para que se pudesse fazer o processamento de toda a informação.
Resultados
Transmissor de posição e movimento (pulseira)
Este dispositivo foi dimensionado e conta com diversos dispositivos importantes para o seu correto funcionamento: acelerómetro e giroscópio, MPU-6050; oxímetro e sensor de batimentos cardíacos, MAX30101; controlador ESP32. Atualmente é possível recolher dados dos dois sensores descritos (MPU-6050 e MAX301031), bem como enviá-los, através de BLE, para os repetidores. Como é observável, foi adicionado um sensor de batimentos cardíacos/oxímetro. Isto foi feito para que se possa acrescentar valor e funcionalidades ao protótipo. Contudo, o foco do projeto (e, consequentemente, da equipa), foi a deteção de quedas, pelo que se decidiu concretizar esse objetivo, sendo que à data atual, apenas estamos a enviar os dados relativos ao acelerómetro e giroscópio (ainda que seja já possível a aquisição de todos os dados e o envio dos mesmos).
Repetidores (Kits desenvolvimento ESP 32)
Os repetidores fazem o encaminhamento da informação da pulseira, para a Unidade de Controlo (via MQTT/IEEE 802.11). Para proceder a este encaminhamento, primeiro fazemos a recolha dos dados enviados pela pulseira, que serve como o Server da comunicação por Bluetooth. Desta forma os repetidores, funcionam como Clients.Após receber os dados provenientes do BLE, os repetidores subscrevem ao Broker do protocolo MQTT e procedem ao envio das mensagens com os dados da pulseira. Este envio de mensagens para o Broker (Raspberry Pi, que funciona também como a Unidade de Controlo) é feito através de 3 tópicos de MQTT: “acc”, que se refere aos dados do acelerómetro; “gyro”, que se refere aos dados do giroscópio; “rssi”, que se refere ao RSSI (Received Signal Strength Indication). Para além disso são lidos os dados de RSSI, que são utilizados para conhecer a força do sinal Bluetooth e, deste modo, ser possível localizar o utilizador dentro de sua casa. Estes dados terão duas importantes funcionalidades: em caso de quedas, saber onde se encontra o utilizador; ser possível reconhecer o padrão diário do utilizador (para, por exemplo, verificar se este se encontra demasiado tempo parado no mesmo sítio, quando não é suposto).
Unidade de Controlo (Raspberry Pi)
A Unidade de Controlo é o dispositivo que processa os dados provenientes dos sensores e os trata, para determinar se existiu, ou não, uma queda. Para além disto, também é aqui que se processam os dados relativos ao RSSI, de forma a ser feita a localização do utilizador. Para fazer todas as avaliações referidas, acede-se às mensagens que chegam ao broker e faz-se a transcrição dos dados recebidos para ficheiros ‘.txt’ (através de um programa em python) que são depois utilizados por um programa, em linguagem C, que trata todos esses valores lidos.
Mais informação
Um projeto como este é, atualmente, importante, devido à situação global da pandemia, pois esta apresenta uma taxa de mortalidade superior em pessoas com mais de 60 anos e os lares de terceira idade apresentam uma taxa de infeção bastante elevada. Isto faz com que este projeto tenha uma tremenda significância na proteção contra o vírus para idosos auto-suficientes, que queiram permanecer nas suas casas. Para além destes casos, não podemos menosprezar os casos em pessoas que não querem ou não têm capacidade financeira para colocar os seus familiares em lares, mas que também não os conseguem ter em casa pois não têm disponibilidade, nem condições, para tomar conta deles. Para tal, com a adesão a este sistema, poderão sair para o trabalho descansados pois sabem que se algo acontecer serão notificados. Visto o nosso projeto ser um sistema de assistência residencial, em que a pessoa idosa é monitorizada, podemos dizer que o utilizador será a pessoa em causa. Contudo, o cliente principal não será o utilizador, mas sim, por exemplo, o membro familiar que quer saber do estado de saúde da pessoa a ser monitorizada. Existe também o caso em que uma entidade de saúde seja o nosso comprador, então teríamos outro novo setor de possíveis clientes. Como exemplo, temos: hospitais, para que possam vigiar algum determinado tipo de utentes (em recuperação, por exemplo); lares, para que seja um possível ter noção do estado de cada utente e para que haja um aviso assim que aconteça alguma coisa ao utente.
Deteção de Quedas
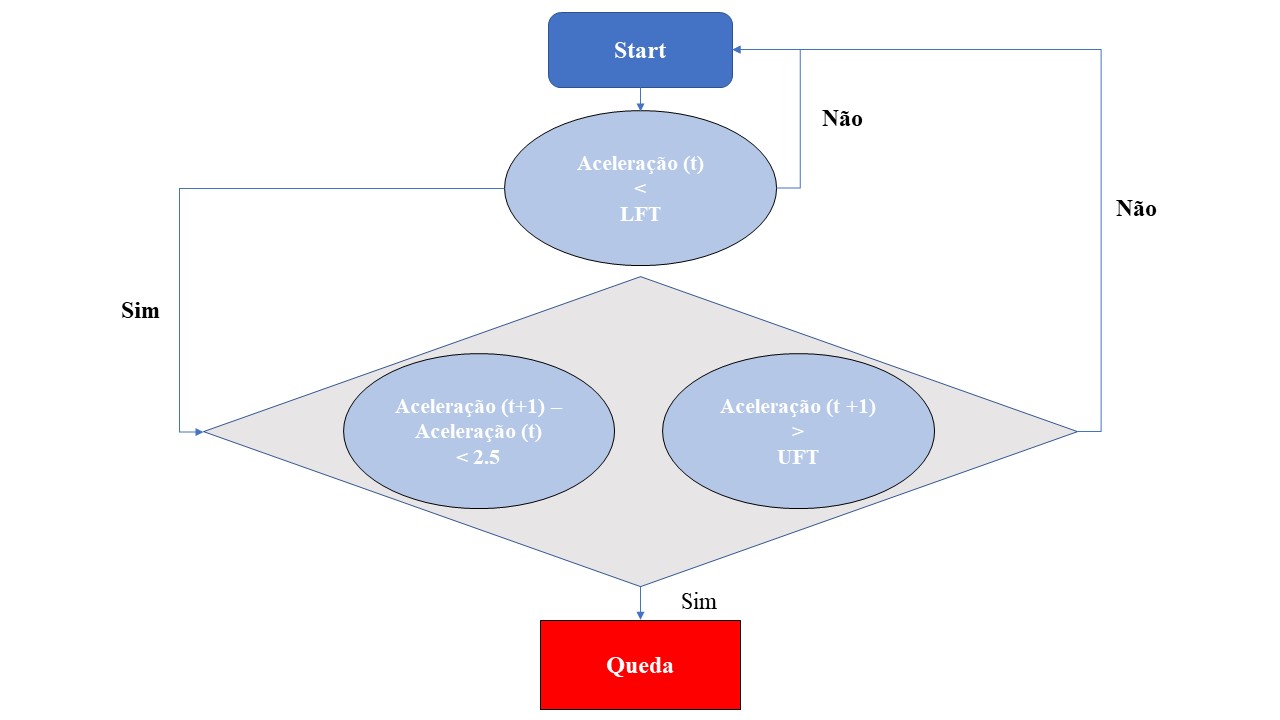
Esta implementação foi a escolhida, dentro da literatura lida, pois aqui era utilizado um acelerómetro/giroscópio de características semelhantes ao escolhido pela equipa (MPU-6050). De acordo com este diagrama, o processo de deteção de quedas consiste em avaliar a magnitude da aceleração e compará-la com dois thresholds:
- LFT (Lower Fall Threshold) que é o valor negativo maior (menor em magnitude) da aceleração lido e corresponde ao momento da queda em si. Atualmente é utilizado o valor de 9 m/s2.
- UFT (Upper Fall Threshold) é o valor maior valor de aceleração lido e corresponde ao momento do impacto logo após a queda. A aceleração lida para comparar com este threshold deverá ser uma aceleração alguns instantes após a aceleração utilizada na comparação com LFT, visto que o impacto só acontece após a queda em si. Atualmente é utilizado o valor de 12.5 m/s2.
Se a aceleração lida, durante a queda (no instante t), for inferior ao LFT, então podemos afirmar que pode ter existido uma queda. Contudo, esta avaliação não é suficiente para se afirmar que existiu mesmo uma queda. Para isso, é necessário fazer mais avaliações:
- se a aceleração no instante seguinte (aceleração no instante t + 1) menos a aceleração lida no instante t for maior ou igual a 3.5 m/s2, então podemos afirmar que houve uma queda.
- se a aceleração no instante t + 1 for superior a UFT, então também se pode afirmar que existiu efetivamente uma queda.
- se nenhuma dessas avaliações se verificar, então não é detetada uma queda e o sistema fica à espera para recolher mais dados.
Localização/Trilateração
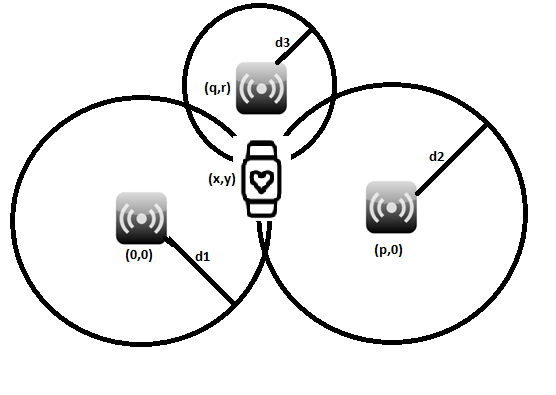
Para além da deteção de quedas, na Unidade de Controlo também se processa a localização do utilizador, dentro da sua habitação. Esta localização é feita através de RSSI.
Inicialmente, considerou-se apenas o RSSI que chega aos repetidores como critério de decisão da localização do utilizador. Entretanto, este método mostrou-se pouco robusto e pouco preciso, sendo que a equipa se dedicou à procura de literatura, de forma a encontrar métodos mais robustos de localização.
Desta forma, implementou-se um algoritmo baseado na técnica de trilateração. Isto implica que, no estado atual do projeto, usamos 3 repetidores para proceder à localização do utilizador. Cada repetidor mede o RSSI entre si e a pulseira, de forma a ser possível perceber a “força do sinal” que este recebe do Server da comunicação Bluetooth, que, no nosso caso, é a pulseira.